Motion planning and MoveIt, MoveIt GUI¶
Motion Planning and ROS MoveIt
Let’s learn the specifics of the MoveIt GUI on a digital twin of the robot. We can start the digital twin with the following launch-file.
roslaunch xarm7_gripper_moveit_config demo.launch
The following learning nugget demonstrates the main features of MoveIt GUI. Even though everything is exemplified using a Franka Emika Panda manipulator, MoveIt is universal to all robot manipulators, so we can practice the same concepts with the digital twin of the xArm7.
Next let’s start MoveIt GUI for controlling the real xArm7:
roslaunch xarm7_gripper_moveit_config realMove_exec.launch robot_ip:=<your controller box LAN IP address>
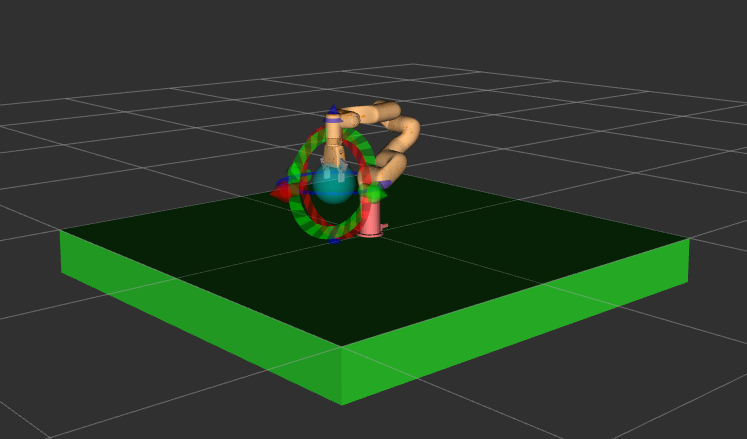
As a first step we need to make sure that the robot would not collide with the desk/cart it is mounted to. We can use the Scene Objects tab in RViz Motion Planning to add a box (size 2,0; 0,2; 2,0) to represent the cart that the xArm7 should avoid when planning its motions. Use the ”+” button to add the box, slide it into place, and hit “publish” to make the box truly a component of the robot’s environment. The final view of the robot and its environment should look similar to this figure.
Try planning to different poses for the manipulator and get a feel of how the robot behaves in the real world.
Enable E-stop, shut down the MoveIt GUI, and shut down the robot.